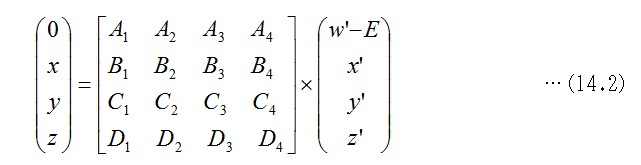
丂慜儁乕僕偺幃14.1偵偍偄偰丄忋偺曽偺幃偱昞婰偟偨係亊係偺儅僩儕僢僋僗偼丄恾宍偺巐師尦悽奅嵗昗偐傜僇儊儔偱尒偨巐師尦帇揰嵗昗偵曄姺偟傑偡丅僇儊儔杮懱偵偼屌桳偺巐師尦偺嵗昗宯傪帩偨偣丄僇儊儔杮懱傪悽奅嵗昗偺拞偱夞揮偝偣傞曄姺儅僩儕僢僋僗傪峫偊傑偡丅忋偺係亊係偺儅僩儕僢僋僗偼丄偦偺媡曄姺儅僩儕僢僋僗偺堄媊傪帩偪傑偡丅戞堦峴偺儀僋僩儖(A1,B1,C1,D1)偼丄媅帡揑側巐師尦僇儊儔偺帇幉偺岦偒傪梌偊傑偡偺偱丄僇儊儔偺埵抲儀僋僩儖(wc,xc,yc,zc)傪扨埵壔偟偰媮傔傑偡丅埵抲儀僋僩儖偺僲儖儉偼丄悽奅嵗昗偺尨揰偲僇儊儔偲偺嫍棧偱偡丅偙偺埵抲儀僋僩儖偼拪徾儀僋僩儖偱偡偺偱丄婔壗儀僋僩儖偺悺朄傪寁嶼偡傞曽朄偱媮傔傞乽帺忔榓傪儖乕僩偵奐偔挿偝乿傪僲儖儉偲尵偄姺偊傑偡丅僲儖儉偼惓偺悢偱尵偄傑偡丅幃14.1偺俤偼晧偺晞崋傪帩偪傑偡偑丄偙偺愨懳抣偑僲儖儉傪昞偟傑偡丅戙悢揑偵幃14.1偺媡曄姺傪峫偊傞偙偲偺婔壗妛揑側堄媊偼丄帇揰嵗昗宯偱尒偰偄傞嵗昗抣偐傜丄尦偺悽奅嵗昗偱偺嵗昗抣偵栠偡偙偲偱偡丅偙偺曄姺偵巊偆係亊係偺峴楍偺媡儅僩儕僢僋僗偼扨弮偵峴偲楍偲傪擖傟懼偊偨揮抲儅僩儕僢僋僗偱偡丅摨偠娭學幃偱嶰師尦偺応崌偼慜復偺13.3崁丄幃13.6偱徯夘偟傑偟偨丅
 忋偺儅僩儕僢僋僗偺彂偒曽偼丄係尦楢棫堦師曽掱幃偺堦師幃偺廤崌傪昞偟偰偄偰丄戞堦峴偼師偺娭學幃偲摨偠偱偡丅乮暣傜傢偟偄偺偱偡偑丄係尦偼嵗昗偺師尦偱偁偭偰dimension偺堄媊丄堦師偼linear偺堄媊偱偡丅乯
忋偺儅僩儕僢僋僗偺彂偒曽偼丄係尦楢棫堦師曽掱幃偺堦師幃偺廤崌傪昞偟偰偄偰丄戞堦峴偼師偺娭學幃偲摨偠偱偡丅乮暣傜傢偟偄偺偱偡偑丄係尦偼嵗昗偺師尦偱偁偭偰dimension偺堄媊丄堦師偼linear偺堄媊偱偡丅乯

2009.2 嫶椑仌搒巗PROJECT |