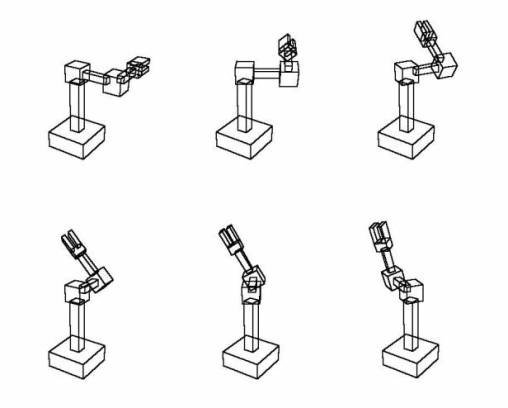
部品間に「…親・子・孫・曾孫…」の関連を付けておくと、個別の部品単独で扱うこともできますし、或る部品を臨時の親として、それに繋がる子・孫・曾孫…をまとめて扱うこともできます。図10.2では、最先端の部品A1,A2をA3の局所座標系で指示した位置に平行移動させてA1,A2,A3の相対的な位置関係を決定します。その次に部品A4の局所座標系で指定した位置に部品A3を移動させます。このときA3がツリー構造の親になっていることを指定すると、A1,A2,A3をまとめて移動させることができます。以下同様に、ツリー構造化した部品を所定の位置に順に移動させて位置を決めます。図10.2の左上がその全体を作図させた原形です。作図命令は単にA9を指定するだけですが、ツリー構造であることを生かすと、A9につながった全モデルを作図します。ロボットアームの関節個所での回転は、それが直接つながった部品間の相対的な回転を指示することで、それから先につながった部品が一体となって回転します。図10.2はロボットアームを個別に回転させていく状態を順に作図させたものです。
図10.2 ロボットアーム運動のシミュレーション
2008.10 橋梁&都市PROJECT |